Hoofdstuk 2: De aansturing
Hoofdstuk 2: De aansturing
Met de aansturing bedoel ik de touch panel, (veiligheids-)relais, …, en de PLC. Al deze componenten zorgen ervoor dat de motor wordt aangestuurd.



2.1 De PLC
De leer van de PLC krijgen we bij de lessen: toegepaste processen (6de jaar).


Ik gebruik het type: Simatic S7-300, PS307 (2A), CPU314C-2 DP
2.1.1 Verklaring benaming PLC
PLC betekent Programmable Logic Controller, wat betekent: programmeerbare logische computer.
Een PLC is dus een toestel dat je kunt programmeren. Met een ingebrachte programma kan je een machine, of in dit geval een transportband laten sturen.
Als we de drie woorden willen verklaren krijgen we dit:



2.1.2 Voordelen van een PLC in verhouding tot een bedrade schakeling
- Een PLC neemt veel minder plaats in.
- Het aansluiten neemt veel minder tijd in beslag.
- Je kan het proces eenvoudig beïnvloeden.
- Een PLC heeft een langere levensduur omdat er geen bewegende contacten zijn. Een PLC is daardoor ook bedrijfszekerder.
- Een PLC is relatief goedkoop omdat de installatie kleiner is en ook omdat de realisatie minder arbeidsintensief is.
2.1.3 Blokschema
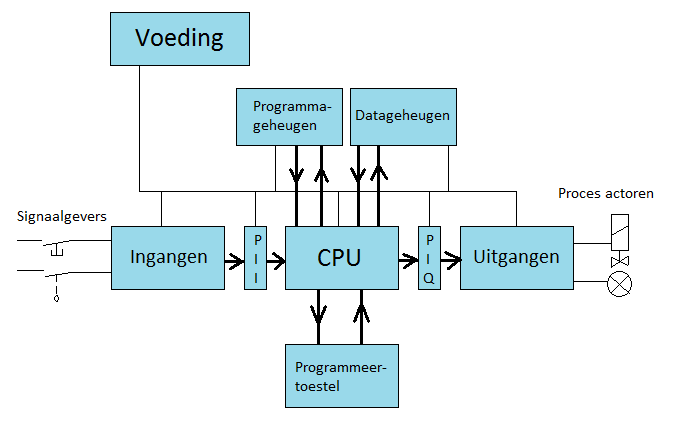

Belangrijkste delen van de PLC:
- Ingangen (inputs)
- Uitgangen (outputs)
- Centrale verwerkingseenheid (CPU)
- Datageheugen
- Programmageheugen
- Ingangsbuffer (PII)
- Uitgangsbuffer (PIQ)
- Programmeertoestel
- Voeding( PS – Power Supply)
2.1.4 Programmaverwerking voorgesteld in een schema
Het programma wordt op de volgende manier in de CPU verwerkt:



De punten 2, 3, 4 en 5 worden dus herhaaldelijk doorlopen en elk programma cyclus moet binnen een bepaalde cyclustijd afgewerkt zijn, anders gaat de PLC in stop!
2.1.5 Step 7
In deze geïntegreerde proef is gebruikt gemaakt van het programma Step 7. Step 7 is een software die gebruikt wordt om de PLC te programmeren.
Er bestaan in dit programma 3 programmeertalen:
- Structured language – STL
- Ladderdiagram – LAD
- Function block diagram – FBD
Ik heb de laatste gebruikt in mijn GIP, omdat wij in de lessen toegepaste processen altijd in deze programmeertaal programmeren.
Step 7 is ontwikkeld door en voor Siemens.
Doordat step 7 een grote serie van gemakkelijk te gebruiken functies bezit, stijgt de efficiëntie van deze software aanzienlijk. Het maakt niet uit of het gaat om programmeren van hardware, ontwerpen van communicatienetwerken of testen.
Bij lineair programmeren slaat men alles op in een complete bouwsteen. Deze bouwsteen is beter bekent als OB1. Deze OB1 zorgt voor een connectie tussen de PLC en het programmeerapparaat. Het is onmogelijk een PLC te kunnen laten werken zonder een OB1, want deze OB 1 wordt continu doorlopen, elke cyclus opnieuw.
Bij programmeren verdelen we het programma in bouwstenen, elke bouwsteen bevat een onderdeel van het programma.


2.2 Frequentieregelaar
De leer van de frequentieregelaar krijgen we bij de lessen: elektrische processen

2.2.1 Inleiding
De frequentie-omvormer of regelaar kan de motor gecontroleerd laten aanlopen, niet alleen door de spanning langzaam te laten stijgen zoals bij een softstarter, maar ook door de frequentie te laten stijgen.
2.2.2 Werking

Het regelen van de frequentie is niet zo eenvoudig. Ik heb geleerd dat de toerental van de rotor afhankelijk is van: het aantal polenparen, de slip en de frequentie.
In de lessen elektrische processen hebben we deze 3 onderdelen bestudeert. Hier een kort besluit:
- Wijziging aantal polenparen: Dit hangt af van de wijze waarop de statorwikkeling wordt gewikkeld. Na het wikkelen ligt het aantal polenparen vast. In principe kan men na de constructie van de motor het toerental niet meer veranderen met de polenparen. Er bestaan 2 uitzonderingen hierop : motor met 2 aparte statorwikkelingen en de dahlanderwikkeling
- Wijziging van de slip: De slip kan gewijzigd worden door: de statorspanning te wijzigen, de rotorweerstanden veranderen, of de rotorspanning wijzigen.
- Wijziging van de frequentie: De frequentieregelaar is een toestel dat de netfrequentie kan veranderen. Als je de netfrequentie verandert dan verandert ook de rotatiefrequentie van het draaiveld en dus ook het toerental van de motor.
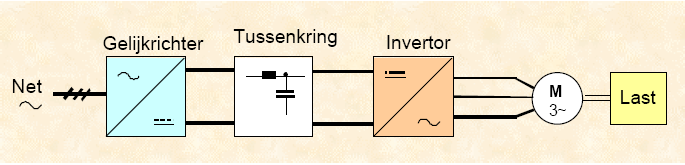
Opbouw van een frequentieregelaar:
Een frequentieregelaar bestaat uit drie delen:
- Een gelijkrichter: vormt de wisselspanning van het net om in een gelijkspanning.
- Een tussenkring: vlakt de pulserende gelijkspanning af en dient als buffer
voor de remenergie. - Een invertor: vormt de gelijkspanning om in een wisselspanning met regelbare frequentie en amplitude.
- Door elektronische schakelaars (meestal IGBT's) te gebruiken, bekom je een blokmodulatie met constante amplitude maar met een regelbare pulsbreedte (fig. 5.2).
- Als je deze blokmodulatie aanlegt aan de motorwikkelingen zal er door de wikkelingen een min of meer sinusvormige stroom vloeien.
- De opgewekte blokmodulatie kan door serie geschakelde weerstanden of spoelen omgevormd worden tot min of meer sinusvormige wisselspanning.
2.3 Touche panel
De leer van de touche panel krijgen we bij de lessen: toegepaste processen (6de jaar).

2.3.1 Inleiding
Met een touche panel kunnen wij het gehele proces volgen. Alle handelingen die de PLC doorgeeft aan de cilinders of sensoren, kunnen wij dus zien. Ook kunnen we met een touche het proces handmatig besturen. In mijn geïntegreerde proef gebruiken we een touche panel van het type KTP 600 DP.
